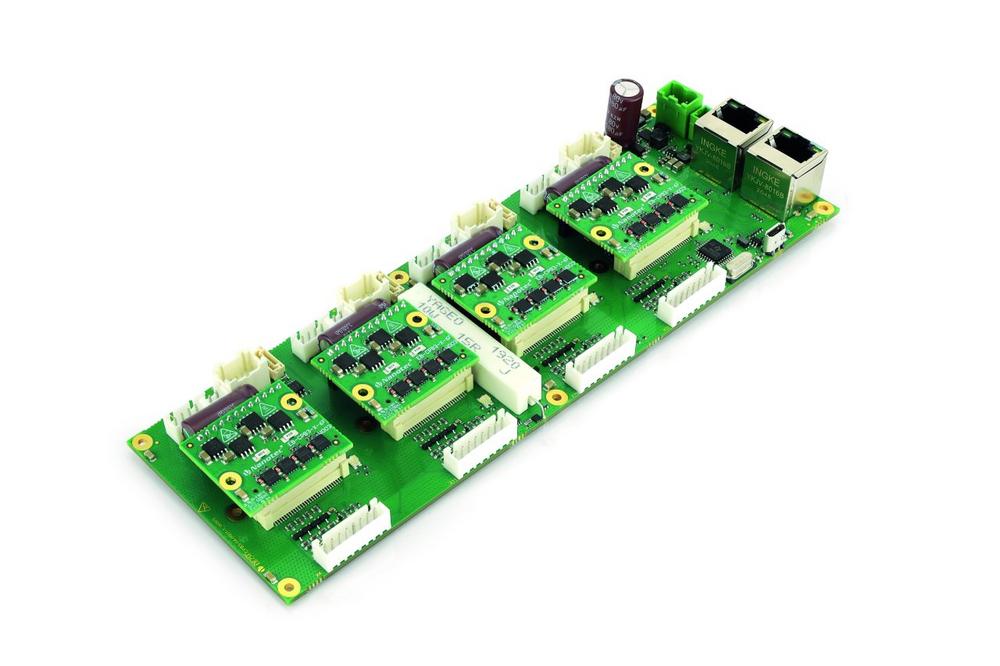
Der EtherCAT-Controller CM-CPB3-44 von Nanotec steuert vier bürstenlose DC- oder Schrittmotoren mit einer Nennleistung von bis zu 150 Watt pro Achse. Feedback zur Motor-position liefern Hallsensoren oder Inkremental- bzw. SSI-Encoder. Jede Achse ist mit vier digitalen Eingängen, zwei Ausgängen, einem Analogeingang und einem Ausgang für eine Sicherheitsbremse ausgestattet. Feldorientierte Drehmoment-, […]